

ブラウン大学の研究者たちは、科学者が月の表面を地図化する方法を変革し、そのプロセスを以前よりもシンプルで詳細かつ正確なものにした可能性があります。
彼らは地図作成技術の改良を惑星科学ジャーナルに発表しました。この出版物の中で、共著者のベンジャミン・ボートライト博士と教授は次のように述べています。 James Head 氏は、彼らのアプローチは「shape-from-shading」として知られる既存のマッピング技術に基づいて、月の地形の詳細なモデルを作成するために使用できると共有しました。

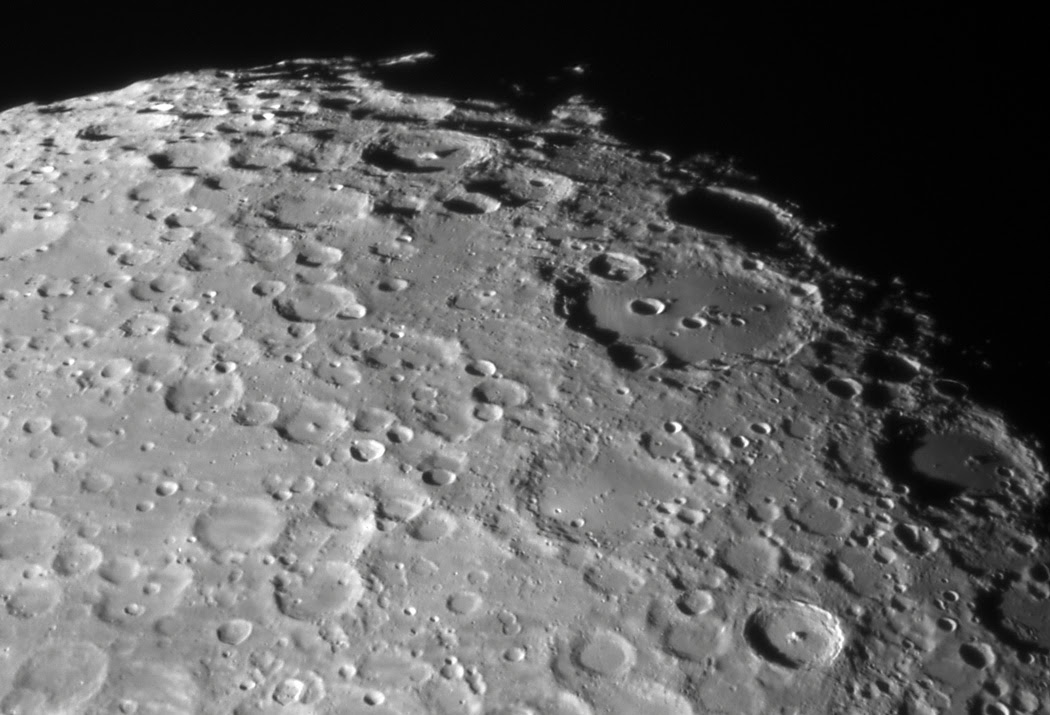
あなたのテクニックは、クレーター、尾根、斜面、地表の危険箇所の詳細を明らかにするのに役立ちます。これは、月の表面のさまざまな部分に光がどのように「当たる」かを分析することで機能し、研究者が 2D 画像の合成から 3D 形状を推定できるようになります。
改良された月の地図
さまざまな視点から調整されたこれらの地図は、より高い精度を提供し、月探査チームが着陸する安全な場所や科学的関心のある地点を特定するのに役立ち、最終的には月探査ミッションをより効率的、安全かつ成功させるのに役立ちます。

「これは、実際にそこに何があるのかをよりよく理解するのに役立ちます」と、ブラウンの地球環境惑星科学部門の博士研究員であり、新しい論文の筆頭著者であるボートライト氏は述べています。
両氏は、2009 年から月の周回軌道を周回している NASA の月偵察機に搭載された機器からのデータを使用し、オープンソース アルゴリズムを使用してツールを作成しました。それが科学へのより公平なアプローチであるとボートライト氏は示唆し、続けて次のように説明した。「私たちは、月の南極の影の部分など、光があまり当たらない月の表面の地形を理解する必要があります。 NASAのアルテミスミッション。」
月の闇を照らして
NASA のアルテミス計画が探査している月の暗い南極など、月の最も暗い領域では、月面の地形を発見することがさらに重要です。
「これにより、自律着陸ソフトウェアは、ミッションを危険にさらす可能性のある大きな岩や岩などの危険を回避して航行できるようになります。このため、詳細な情報が多ければ多いほど良いため、可能な限り最高の解像度で地表の地形をマッピングするモデルが必要です」とボートライト氏は述べています。
ブラウン大学のチームは技術を改良することで、複雑な照明や地形や影の不正確さなどに制限されることが多い、精密地図の開発に伴う労働集約的な側面を回避している。
「これらの新しい地図作成製品は、アポロ計画中の探査計画に使用されていたものよりも大幅に優れており、アルテミスやロボットミッションからの計画計画と科学的フィードバックを大幅に改善します」と教授は述べた。頭。
チームは、位置合わせまたは調整された画像が一致するかどうかを確認し、一致しないものを削除するなど、アルゴリズムとフィルターを通じてアプローチの精度を向上させ、潜在的なエラーを削減しました。これは、月の表面のより広い範囲をカバーする際の効率の向上にもつながります。
ニュース参照:
LOLA および LROC NAC デジタル標高モデルのシェイプ フロム シェーディングの改良: 今後の有人およびロボットによる月探査への応用。惑星科学ジャーナル。 DOI: 10.3847/PSJ/ad41b4 。

-w1280.JPG?resize=1080,720&ssl=1 "イーロン・マスク氏、ポラリス・ドーンのミッションを開始:4人の宇宙飛行士が歴史を作るために宇宙へ")