


肺がん患者の命を救うために、研究者らは肺組織内を移動できる非常に柔軟でありながら堅牢なロボットを開発しました。

Science Robotics誌に掲載された研究で、ノースカロライナ大学チャペルヒル校とヴァンダービルト大学の研究者らは、気道や血管などの重要な構造を避け、生きた実験室モデルを自律的に移動するロボットの能力を実証した。
肺がん患者の希望
肺がんは、におけるがん関連死亡の主な原因であり、肺組織の奥深くにある小さくて到達しにくい腫瘍のため、重大な課題となっています。

共著者でインターベンション肺学および肺腫瘍学のセクションチーフであるジェイソン・アクリアン博士は、外科医はこの新技術により、標準的な気管支鏡やロボット気管支鏡では達成できない目標に到達できるようになるだろうと説明した。 「これにより、さらに数センチメートル、場合によっては数ミリメートルが得られ、肺内の小さな標的を見つけるのに非常に役立ちます」と彼は言いました。
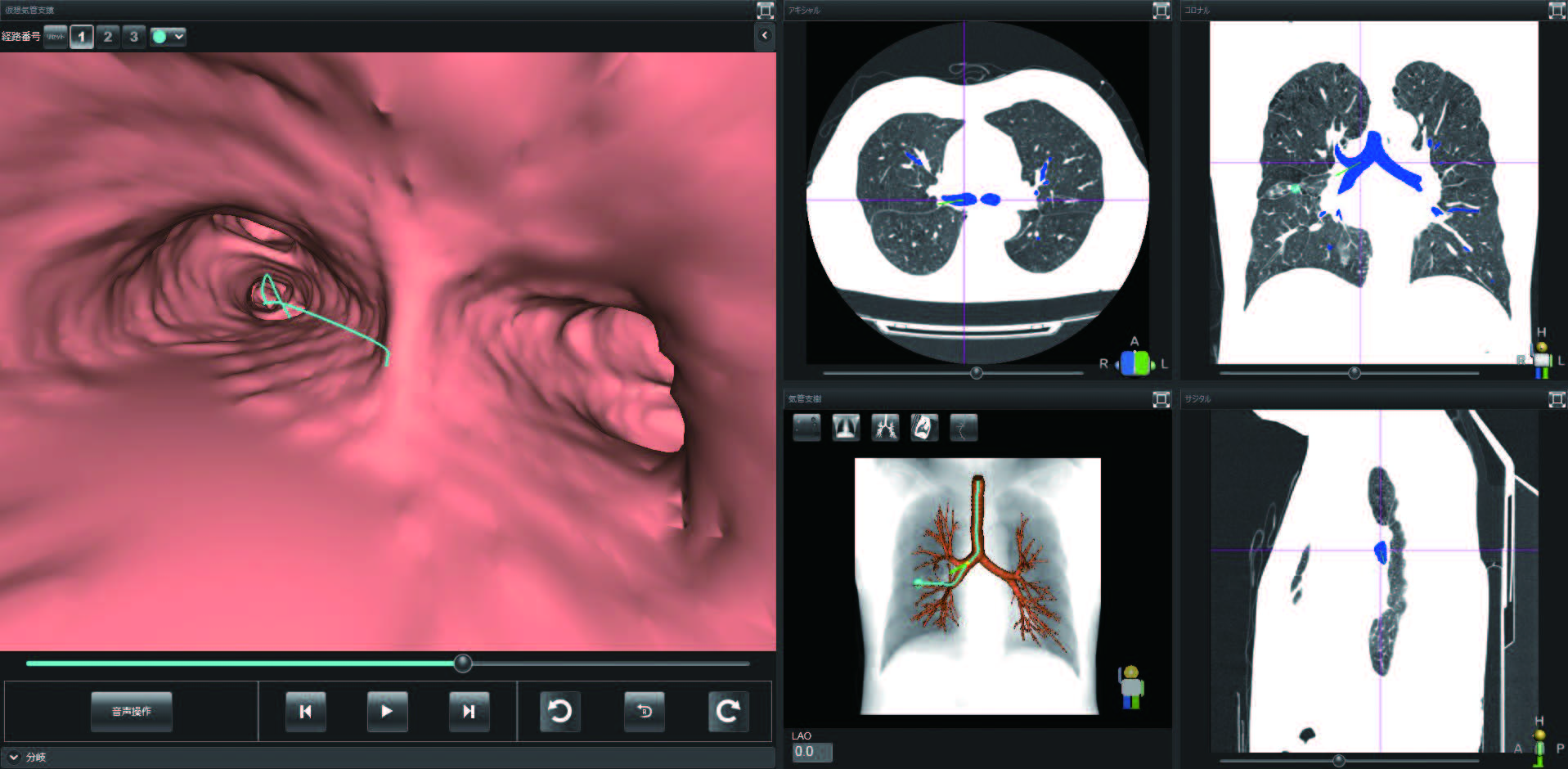
このロボットは肺生検などの複雑な処置向けに設計されており、柔軟性を高めるためにレーザーエッチングされたニッケルチタン合金製の針を使用します。次に、 AI ベースのソフトウェアと CT スキャンから作成された肺の3Dモデルを組み合わせて、自動運転車のように、針をある点から別の点に誘導し、リアルタイムで障害物を回避します。
医学、コンピューターサイエンス、工学の共同努力により、このコンパクトでありながら高度な自律操縦可能な針が誕生しました。

自動運転車との類似点
このプロジェクトの主任研究員であるロン・アルテロビッツ博士は、この車は「肺組織の中を移動し、重要な血管などの障害物を避けながら目的地に向かう」という点で自動運転車に似ていると述べた。同氏は、呼吸による肺の動きにも関与している可能性があり、精度が高まると付け加えた。

この研究は有望ですが、研究者らはまだ改善の余地があることを認めています。しかし、彼らは安全性を最優先に医療ロボットの限界を押し上げるイノベーションの可能性に興奮しています。
「私たちは、ロボット工学とAIの強みを組み合わせた新しい自律型医療ロボットの開発を継続し、さまざまな医療課題に直面している患者の医療成果を向上させると同時に、患者の安全性も保証する予定です」とアルテロヴィッツ氏は付け加えた。

-w1280.JPG?resize=1080,720&ssl=1 "イーロン・マスク氏、ポラリス・ドーンのミッションを開始:4人の宇宙飛行士が歴史を作るために宇宙へ")